Designed a pneumatically powered soft finger for a soft robotics course project. The finger is made out of an Ecoflex 30A Silicone elastomer that was molded in a two part molding process.

The first mold creates the internal air cavities of the finger with an overmolded piece to connect to the air supply. The second mold is a rectangular tray (not pictured) that is filled with silicone and a thin fabric to create the bottom of the finger. Once both molds have cured, the two pieces are glued together with silicone.
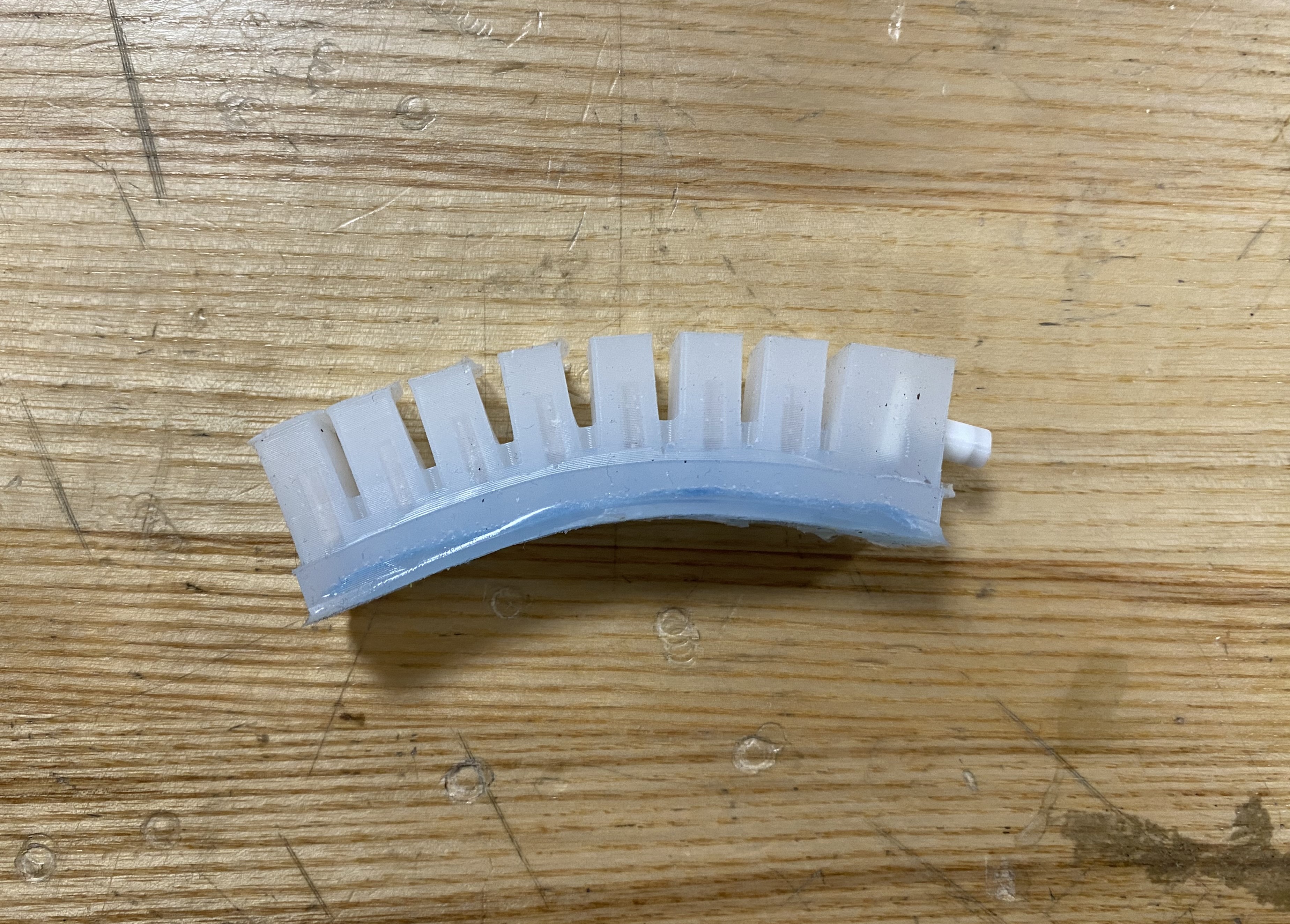
When the finger is pressurized with air, the thinner ribs expand causing a curling motion of the finger. The bottom of the finger which is thicker and has the fabric inlay is stiff enough to not expand.